Exemple de sonde virtuelle#
Cet exemple illustre l’utilisation d’une sonde virtuelle. Splash supporte les projections sphériques et équirectangulaires. Cette fonctionnalité est utile lorsque la source d’entrée est incompatible avec la surface de projection. Dans l’exemple suivant, nous allons montrer comment Splash peut être utilisé pour créer une projection sphérique ou équirectangulaire à partir d’un cubemap. Ci-dessous, l’image cubemap qui sera affichée dans le dôme.
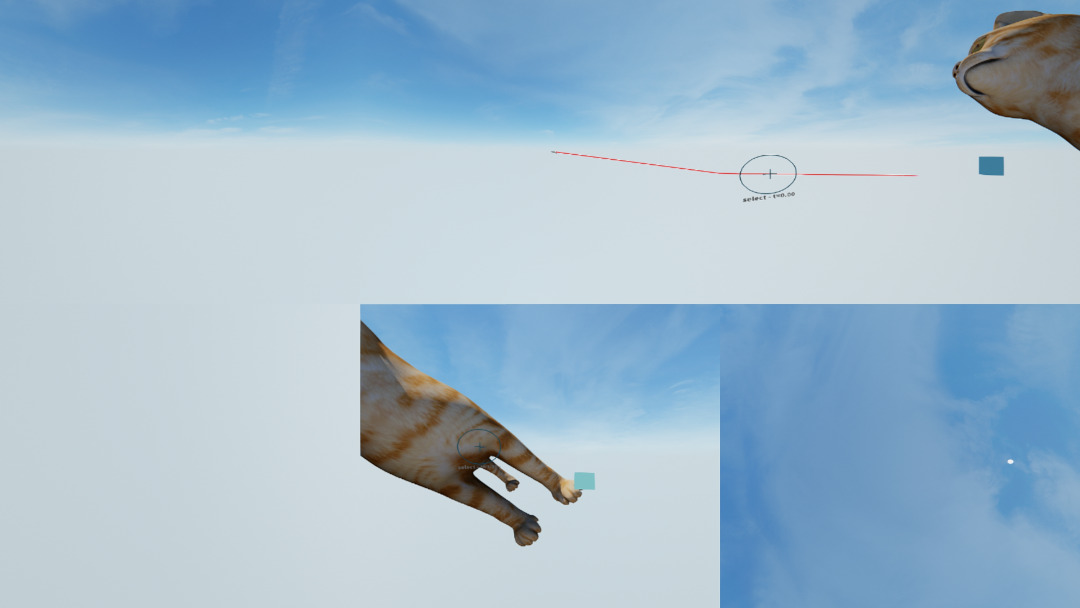
Image cubemap de sonde#
Comme pour les exemples précédents, la suite d’étapes est la suivante:
créer un modèle 3D basse définition de la surface de projection, utilisé lors de l’étalonnage,
exporter depuis Blender un fichier initial de fichier de configuration,
ouvrir le fichier dans Splash, calibrer les vidéo-projecteurs en utilisant la mire de couleur,
créer un modèle haute définition de la surface de projection, utilisé lors de la projection,
remplacer le modèle 3D basse définition par le modèle haute définition,
Dans le fichier de configuration Blender, remplacer l’image par la sonde
charger l’image cubemap sur la surface de projection
Comme le flux de travail reprend les mêmes étapes que l’exemple précédent, cet exemple continuera là où la démonstration précédente s’est arrêtée, c’est-à-dire après le chargement du maillage haute définition dans Splash. Sauvegardez cette configuration avec Ctrl + s.
Créer un modèle 3D du cubemap et mettez à jour l’arbre nodale#
Nous allons commencer à partir du fichier de configuration précédent de Blender. Le nœud Image est maintenant remplacé par un nœud sonde. Un nœud Object est connecté à la sonde. Cet objet reçoit en entrée un nœud Image (cette image est rendue sous une projection cubemap) et un nœud Mesh associé à un maillage de cube. Voici l’arborescence finale :
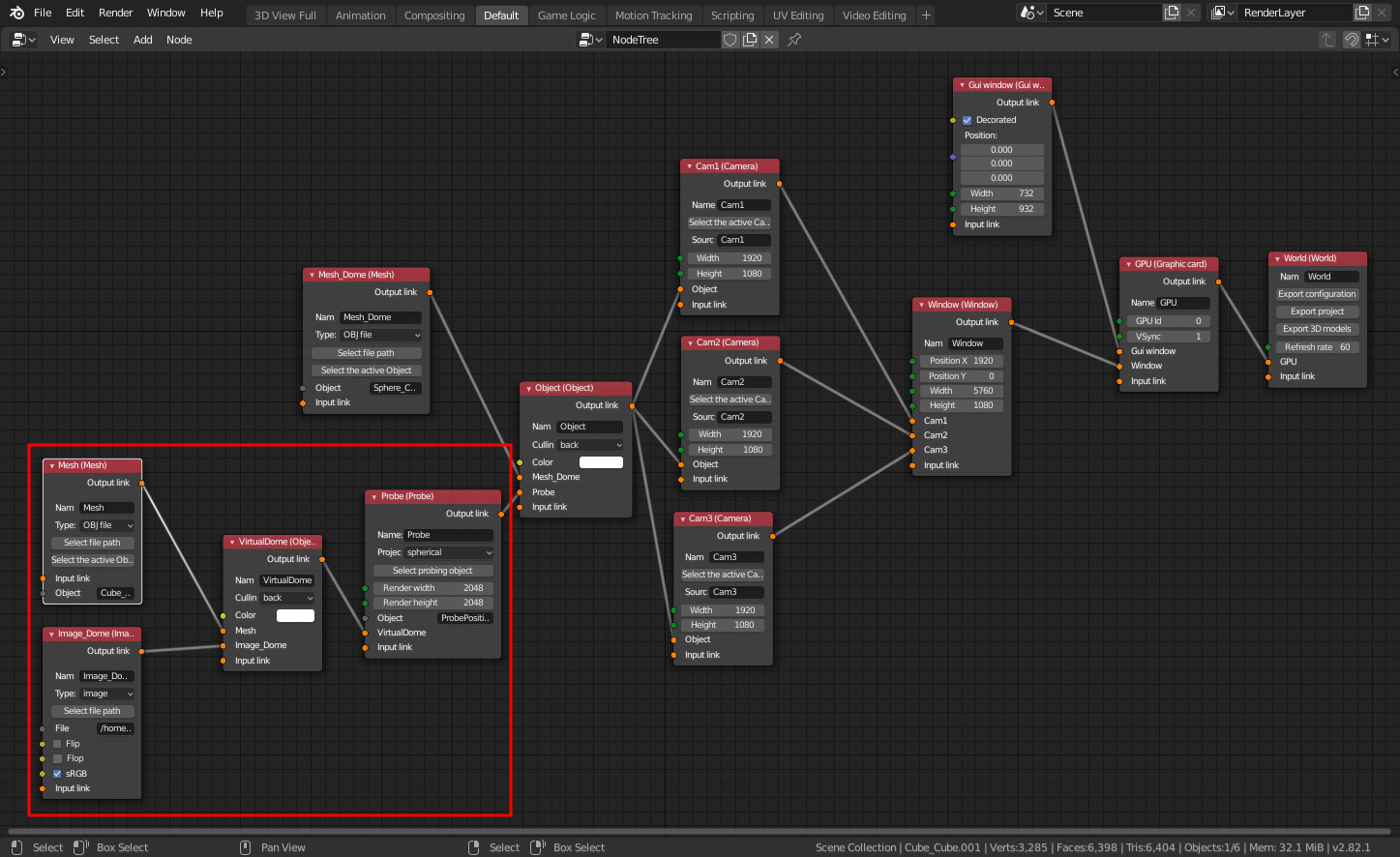
Arborescence de la sonde dans Blender#
Remarquez que la projection de la sonde est définie comme sphérique et que la largeur et la hauteur du rendu sont de 2048x2048. Le nœud cubemap a un back culling puisque nous projetons « virtuellement » à l’intérieur d’un cube. Il faut faire attention lors de la génération des UVs du cube. Les coordonnées de la texture doivent être cohérentes avec le cubemap de l’image reçue. Si nécessaire, réordonnez/évaluez l’éditeur UV de Blender.
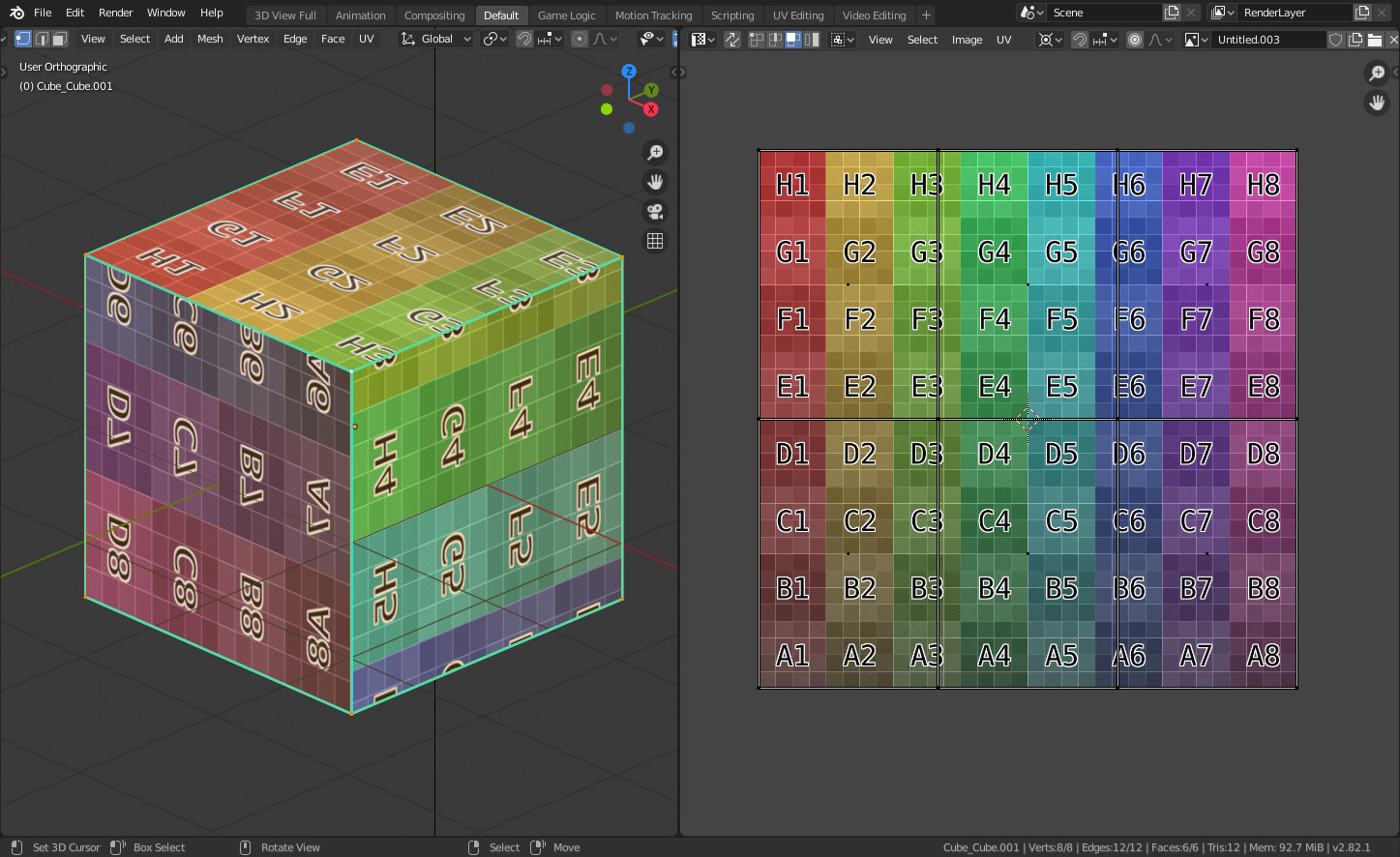
UVs de la sonde dans Blender#
La configuration de Splash peut être exportée via le bouton « Export configuration » du nœud World. Les modèles 3D doivent également être exportés. Veillez à enregistrer ce fichier de configuration sous un nom différent de celui du fichier de configuration calibré de l’exemple précédent.
Chargez la nouvelle configuration dans Splash#
Chargez le fichier de configuration depuis la ligne de commande:
splash probe_config.json
Deux fenêtres apparaîtront, une sans bordure et une autre qui affichera l’interface graphique en appuyant sur Ctrl + Tab. Les caméras de ce fichier de configuration ne sont pas calibrées. Nous allons copier les positions et orientations des caméras de l’exemple précédent. Dans le menu File, sélectionnez “Copy calibration from configuration”, puis sélectionnez le fichier à partir duquel vous souhaitez copier la configuration.
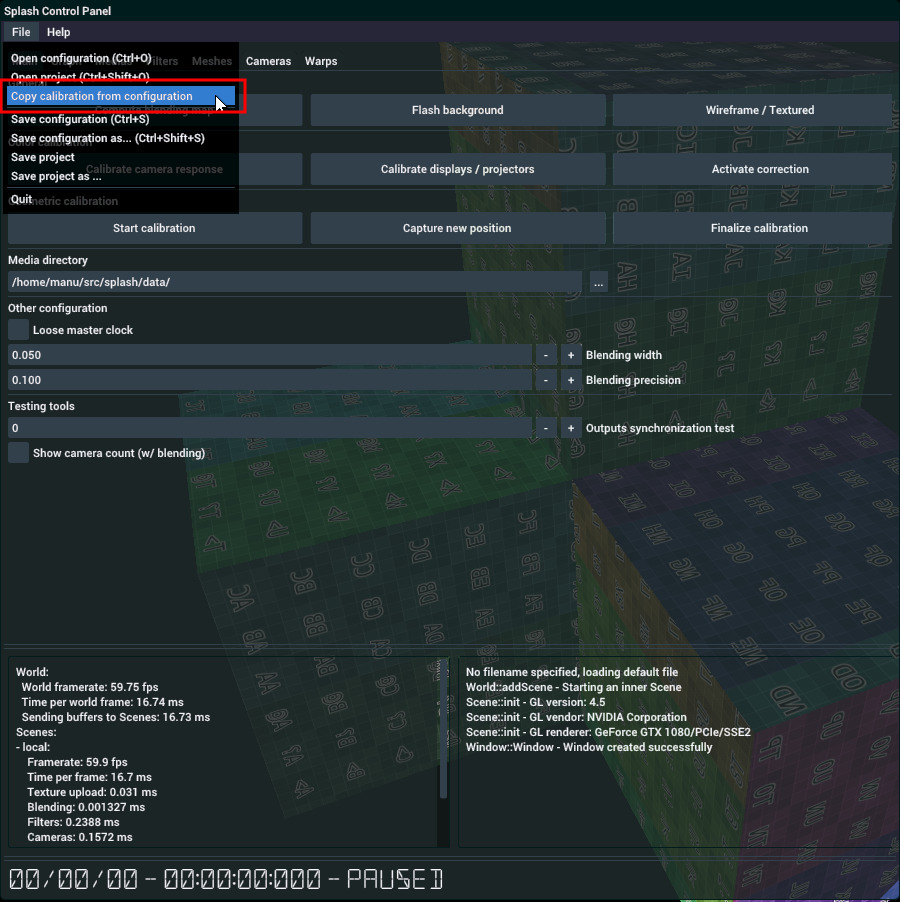
Copie de la configuration de la sonde#
Les paramètres des caméras, ainsi que les déformations, sont maintenant transférés dans le fichier de configuration actuel (probe_config.json). La configuration est maintenant terminée. Vous devriez voir une image avec une projection sphérique.

Sonde de projection sphérique#